



Electronics Show 2005
Students in the Electronics class displayed their projects for the campus and community in a grand show in the Science Hall lobby.
Projects were varied–robotics, electronic music, and balancing acts. Many of the projects required significant mechanical design and construction.
This year every project used microcontrollers–single chip computers that can be programmed to respond to sensor inputs and can control outputs. For those in the know, we used the PIC 16F88 programmed in PicBasic Pro.
Much work was spent on interfacing, learning the hardware and software details involved in sending serial data signals. Besides “standard” serial we had to learn the PS/2 mouse, MIDI musical instrument, and I2C sensor protocols.
For the first time we had a panel of judges (identified by hardhats) to make some special awards.
Projects
- Antigravity Stick
David Glick
Overall Winner - Air Harp
Jacob Stucky
Josiah Ditzler
Elegance Award Winner - H2O2 Robot Squirter
David Bontrager
Mitch Yoder
Creativity Award Winner - Robot Line Follower
Jono Mast
Eric Krabill - MIDI Hendrix Guitar player
Matthew Rody - Mouse Interface
Israel Ditzler
Moshe Hodges - RoboPendage
Travis Weaver
Ben L Yoder - Segway Junior II
Jonathan Nafziger
Victor Oyeyemi
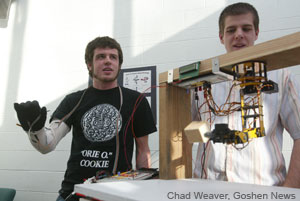
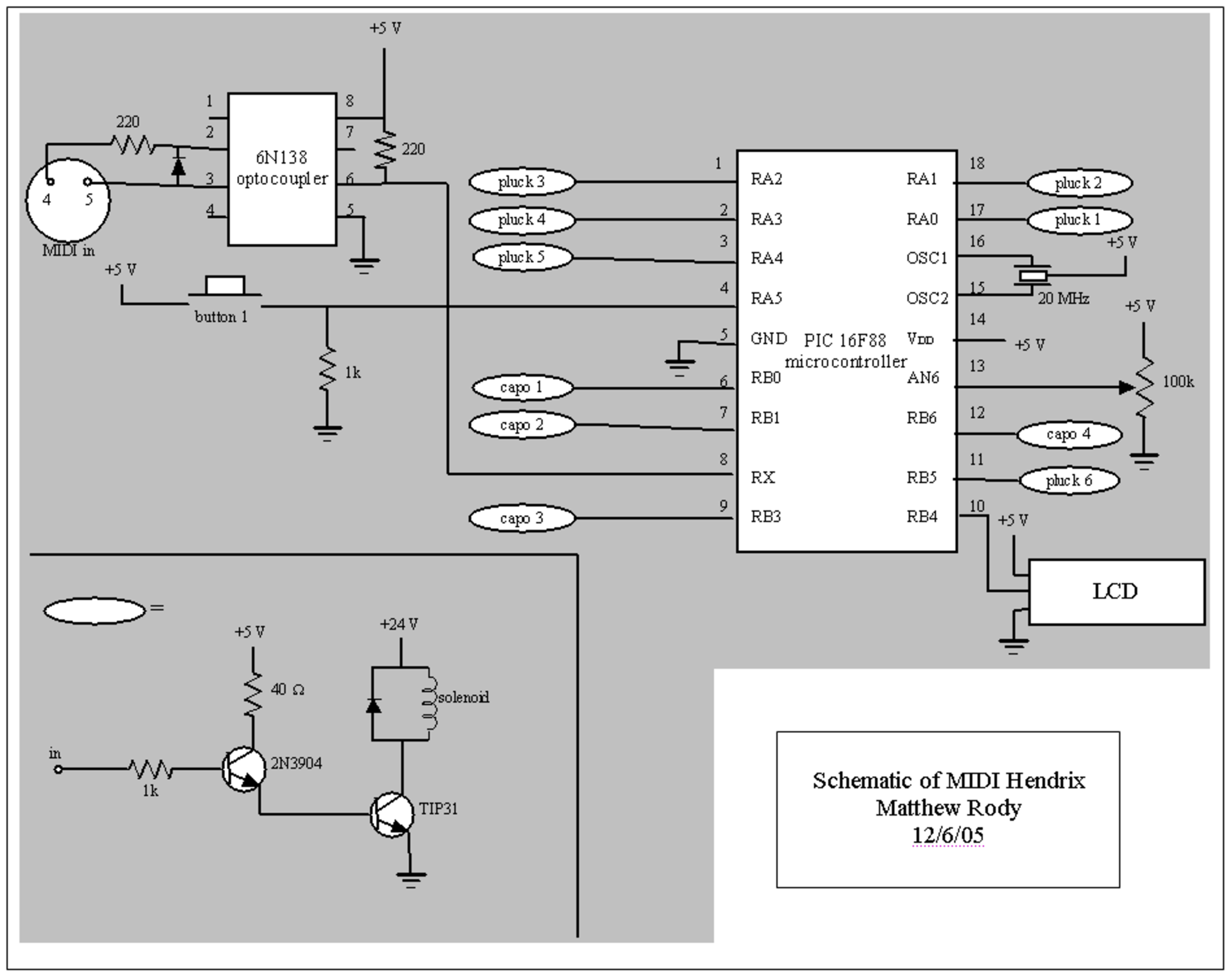
MIDI Hendrix Guitar Playing Robot
Matthew Rody

MIDI (musical instrument digital interface) is the language that electronic musical devices use to communicate with each other. Messages are sent through a single wire in the form of three bytes of information: the status byte, which says to turn a note on or off, and two data bytes, the first saying what note to play and the second saying how loudly to play that note. The Microprocessor of MIDI Hendrix receives MIDI messages from an electric keyboard or some other MIDI device and interprets them. Then it sends out signals to 10 different solenoids, four of which control “capos” and six of which control “pluckers.” The solenoids then move back and forth to capo or pluck a string in a way to play the note that was sent to the microprocessor. Rock on.
{kind=link}
Antigravity Stick
David Glick
Overall Winner

The Anti-Gravity Stick circuit and apparatus keep an ordinary broomstick upright by adjusting the position of its base. The position of the top of the stick is measured using ultrasonic rangefinders, and the microcontroller uses this information to control the servomotors which move the platform. The project succeeded in balancing the stick in two dimensions for minutes on end.
{kind=link}
Mouse Interface
Israel Ditzler
Moshe Hodges

The mouse interface is a connection of a standard PS/2 Mouse used on most computers to a microcontroller. Microcontroller communicates with the mouse sending the information needed for the mouse to start sending coordinate information. The microcontroller then reads the coordinate information that is sent by the mouse and processes it. That coordinate information is then inputted into a 2D Plotter which plots the X and Y movements of the mouse, resulting in a plot that follows the mouse.
{kind=link}
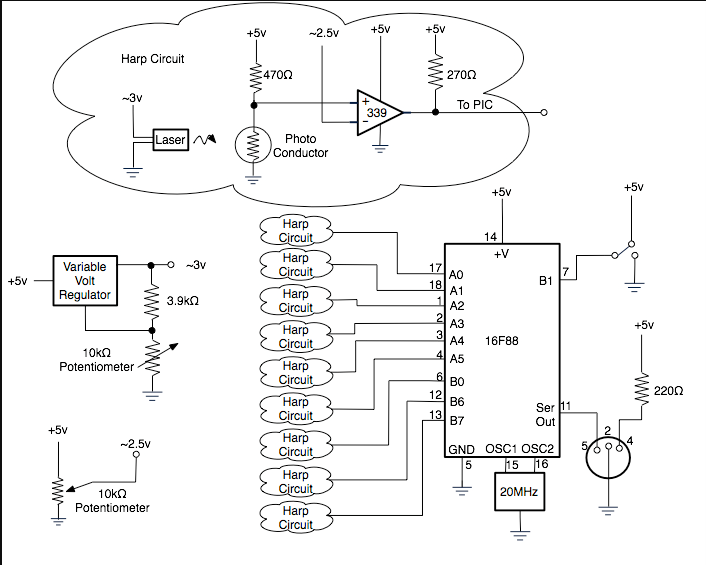
Air Harp
Jacob Stucky
Josiah Ditzler

Elegance Award Winner
Notes are played by “plucking” laser beams instead of strings. The laser beams are hitting photo conductors whose resistance changes depending on how much light is hitting them. This change in resistance then gets translated into a digital “on” or “off” signal that is read by the microcontroller. The microcontroller then outputs a signal that can be read by almost all electronic musical instruments. This signal uses MIDI (Musical Instrument Digital Interface) which is standard for reading and sending electronic musical signals.
{kind=link}
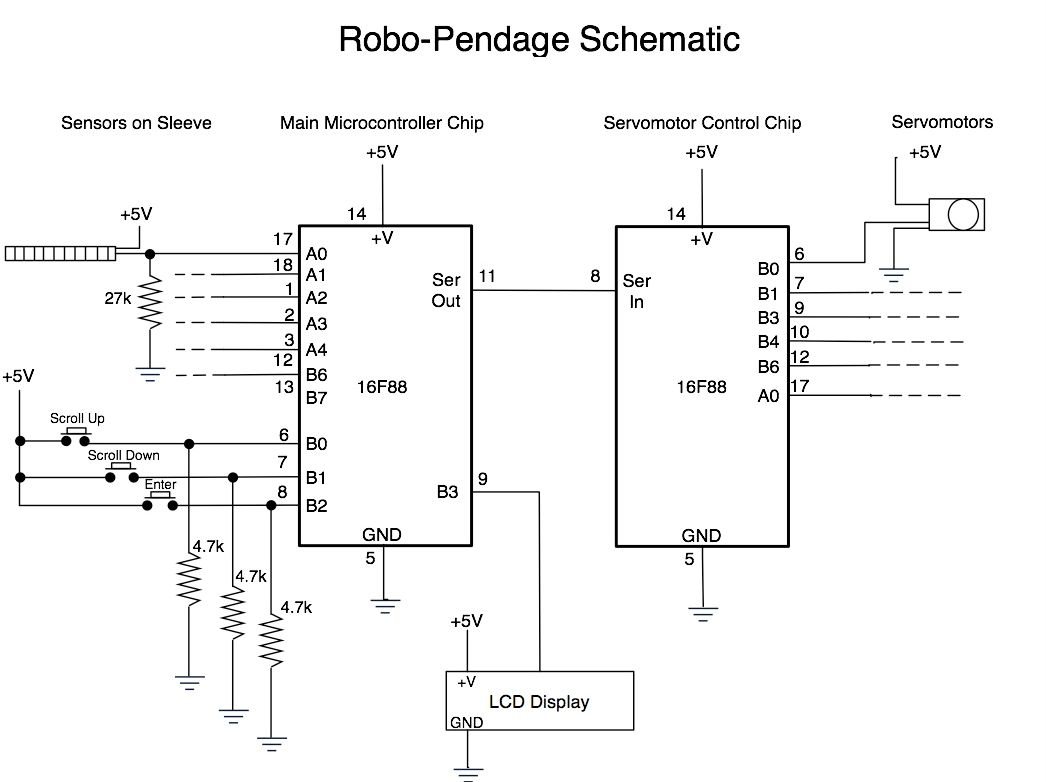
RoboPendage
Travis Weaver
Ben L Yoder

Robo-Pendage is a servomotor-controlled robotic arm that is designed to roughly reproduce the motions of a human arm through a sleeve worn by the operator. Flex sensors, which change resistance based on the degree to which they are bent, are mounted on the sleeve and supply data on the position of the arm and hand to the main microcontroller chip. The main chip then processes this data independently of timing constraints required by the servomotors on the robotic arm. The servomotor positions are then sent from the main chip to the servomotor control chip, which drives the servomotors used to position the robotic arm.
{kind=link}
Robot Line Follower
Jono Mast
Eric Krabill

Gnar-Bot is a line following and maze solving robot. It has three infrared lights and sensors mounted between the front wheels. Different materials and colors reflect the light differently which enables it to tell the difference between lines and the floor. The sensor is connected to the microcontroller chip which sends signals to the wheels based upon the incoming signals from the sensor. The chip contains different programs which alter the signals sent to the wheels, allowing Gnar-Bot to follow or avoid lines, navigate through a maze, or to be controlled by the onboard buttons.
H2O2 Robot Squirter
David Bontrager
Mitch Yoder
Creativity Award Winner

H2O2 is a fully automatic robot capable of delivering a short burst of water in the direction of a heat source (such as a person, or a warm wall). This is accomplished through the use of a directional heat sensor on a servo that sweeps the sensor back and forth. To solve the problem of running into obstacles, a distance sensor is included on the sweep arm to “watch” where the robot is going.
Segway Junior II

Jonathan Nafziger
Victor Oyeyemi