Maple Scholars Summer Research Program
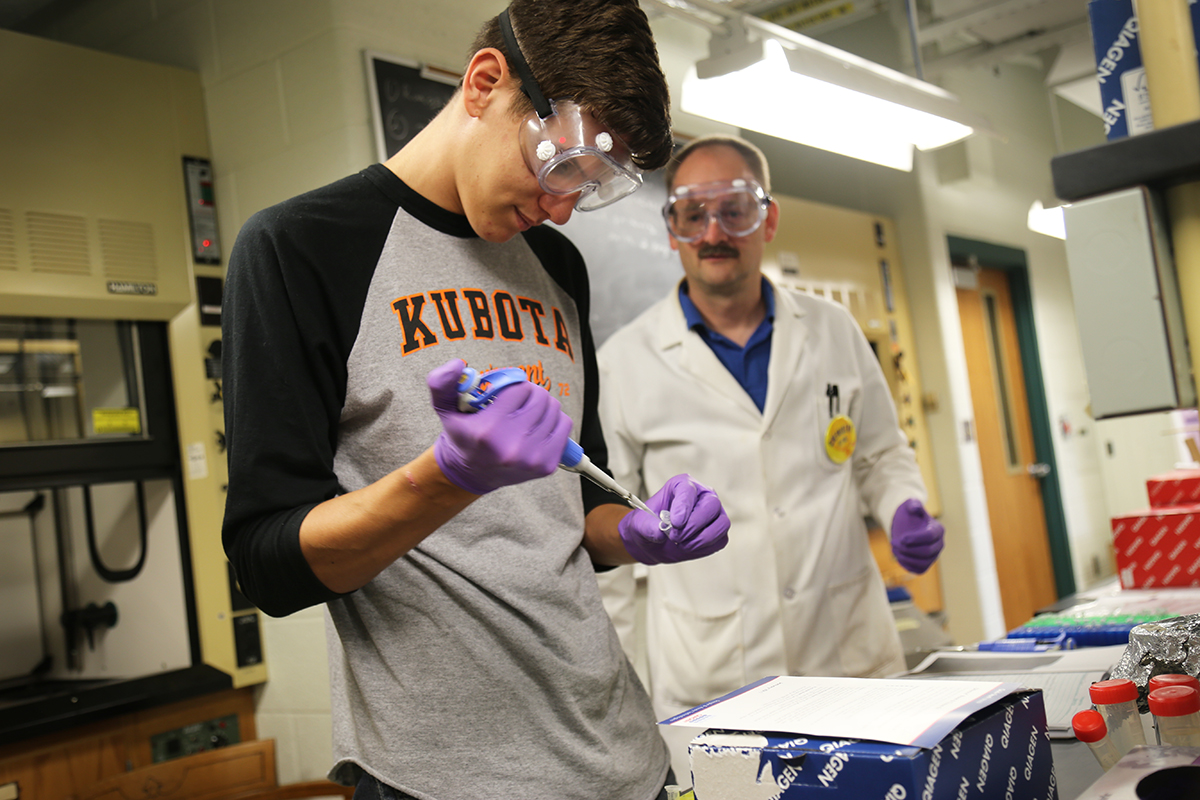
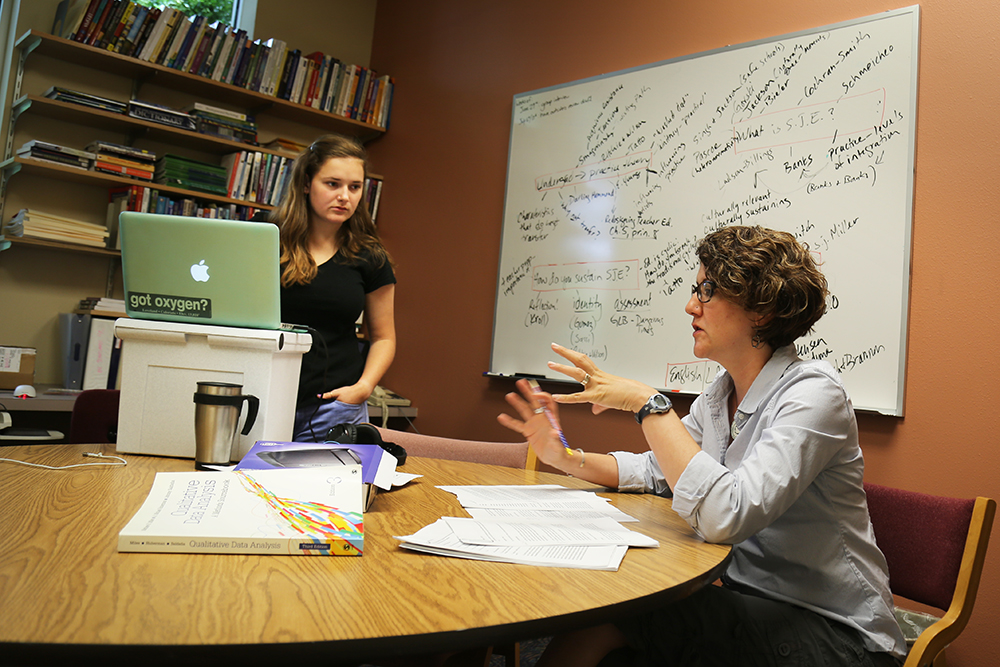
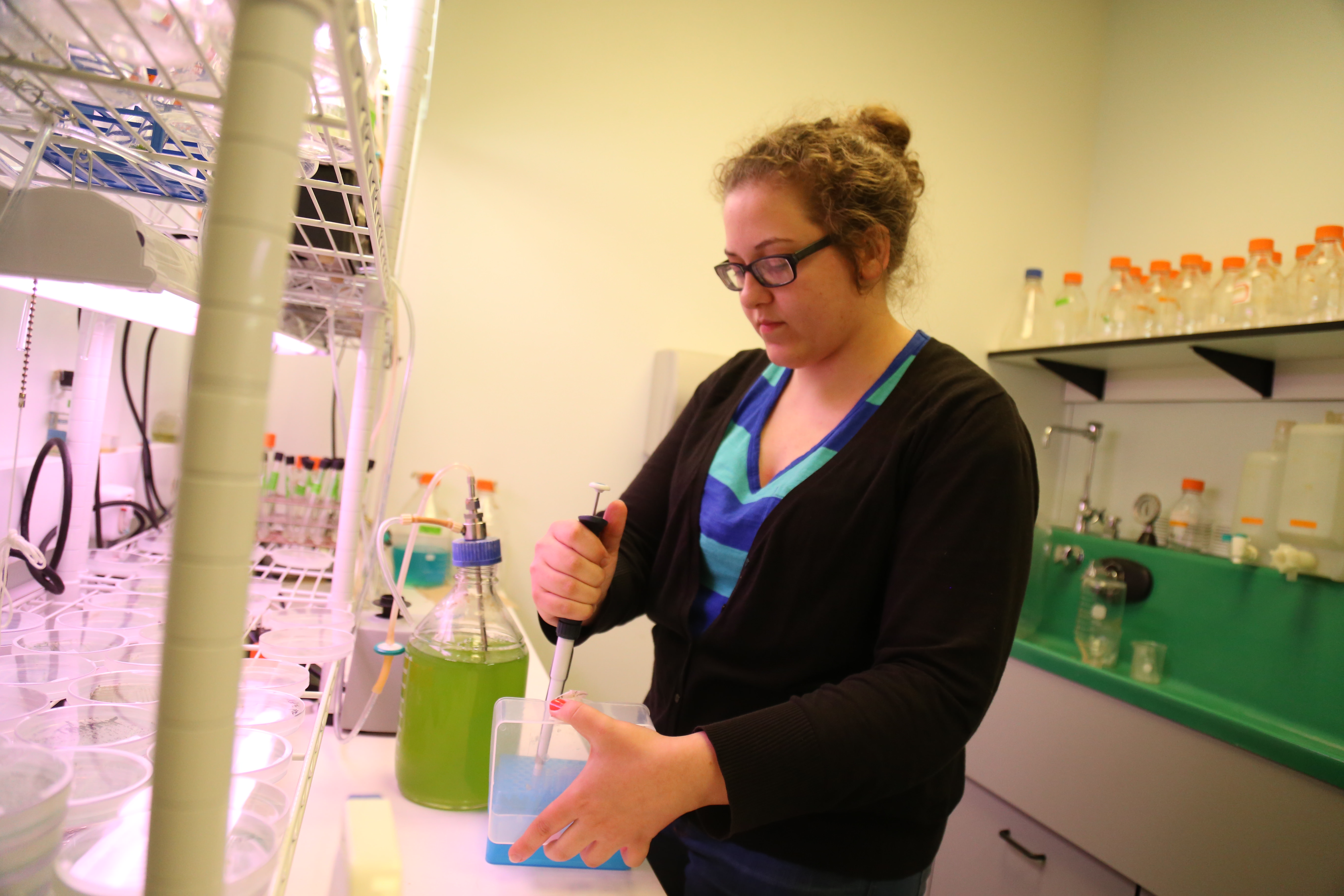
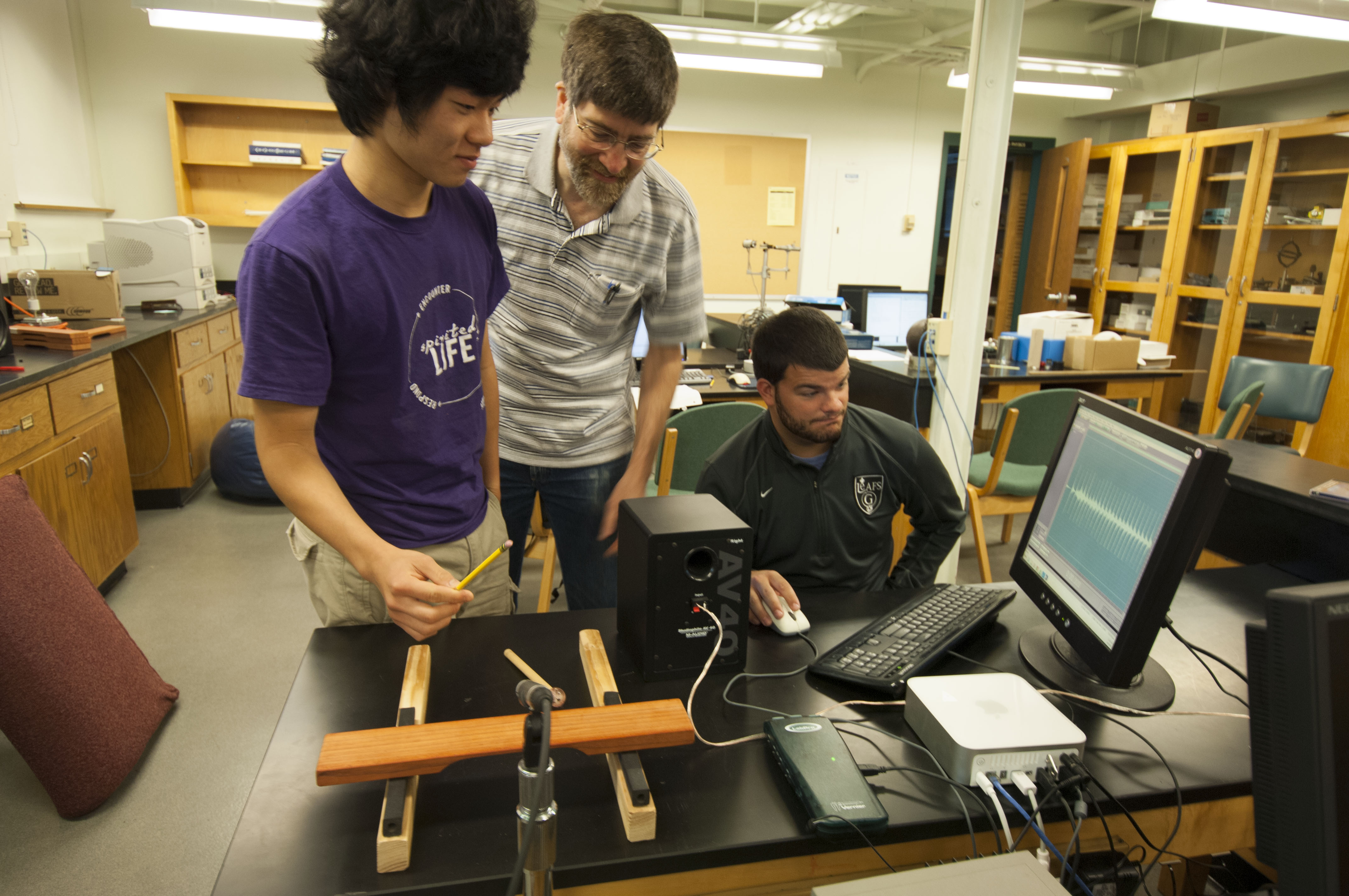
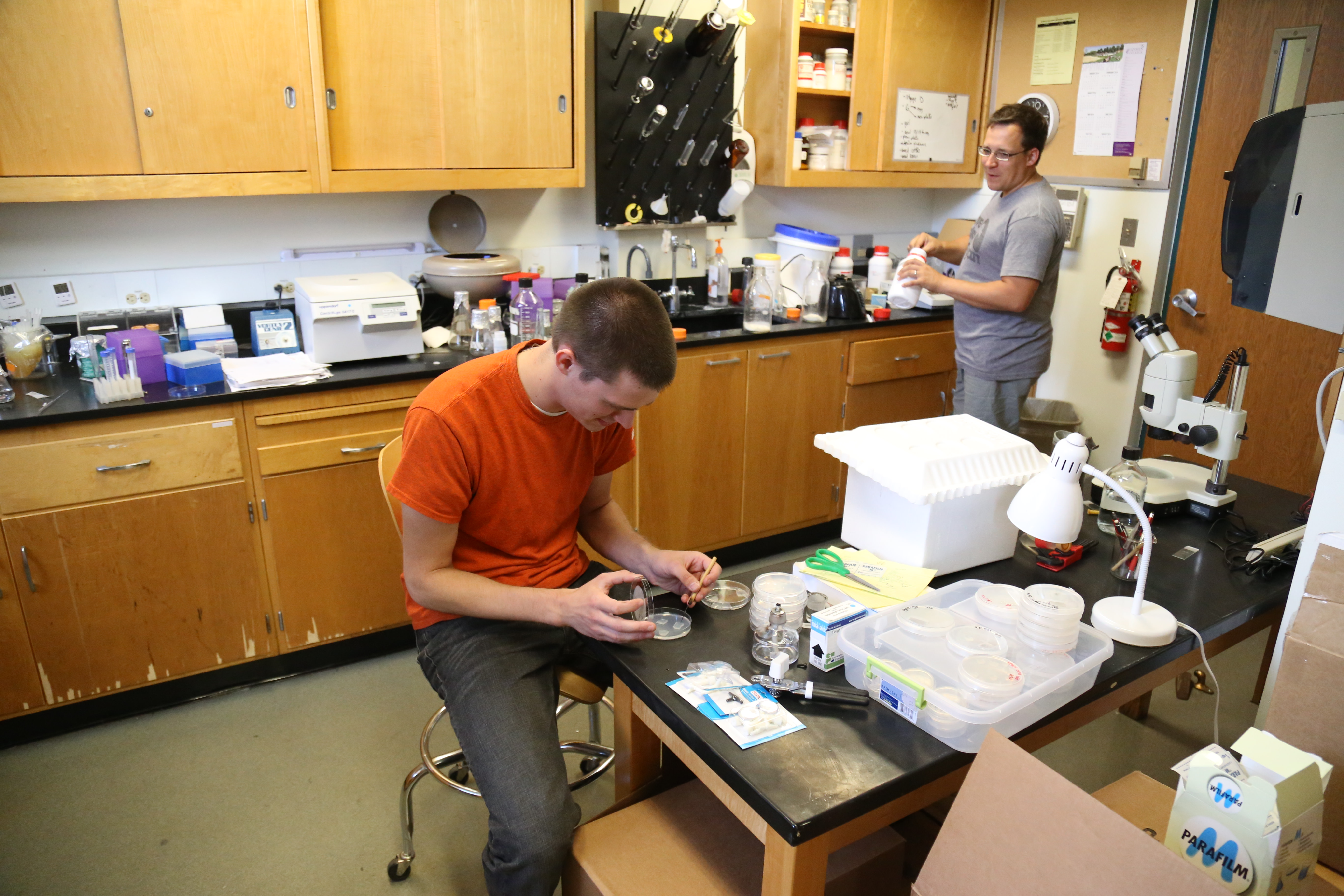
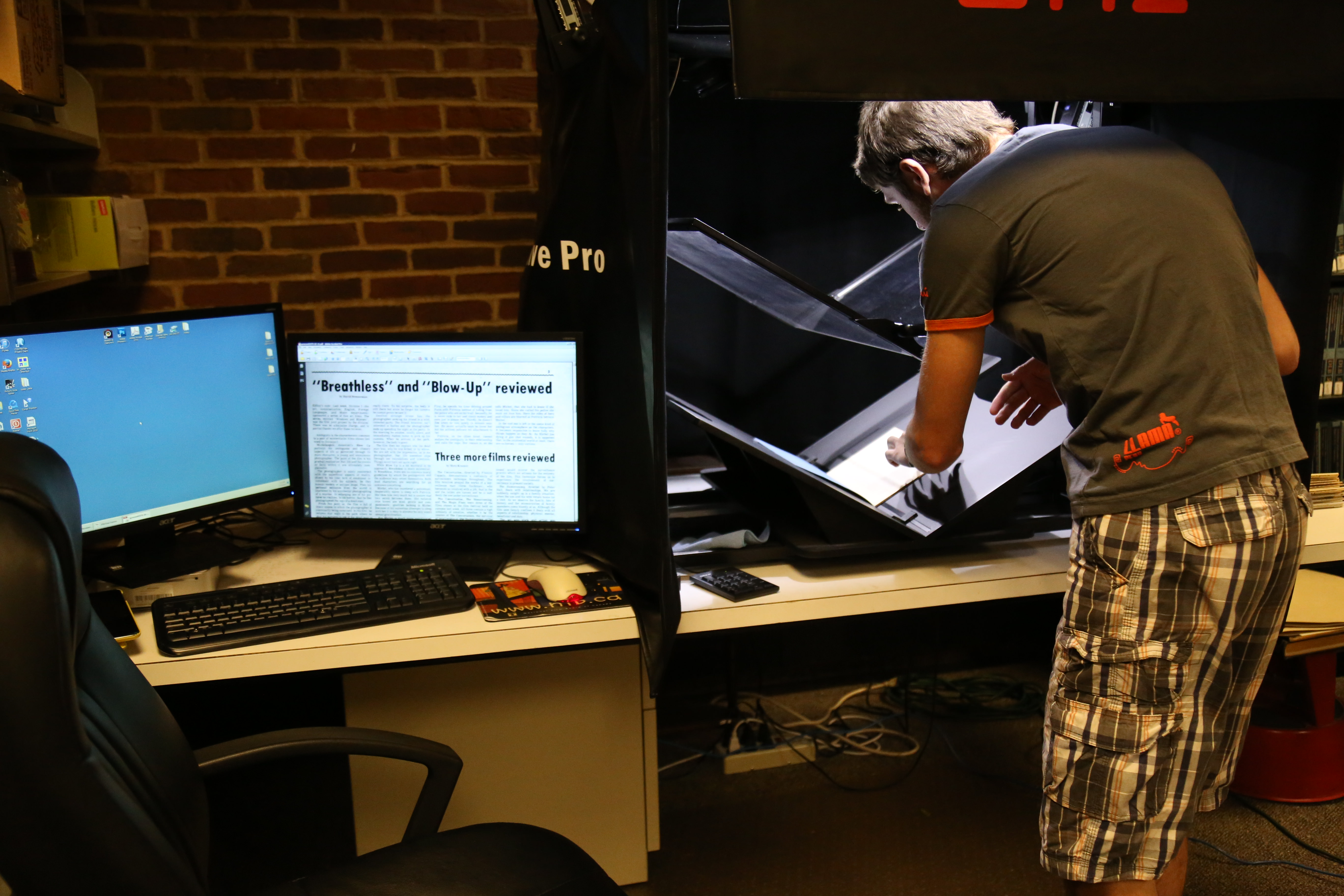
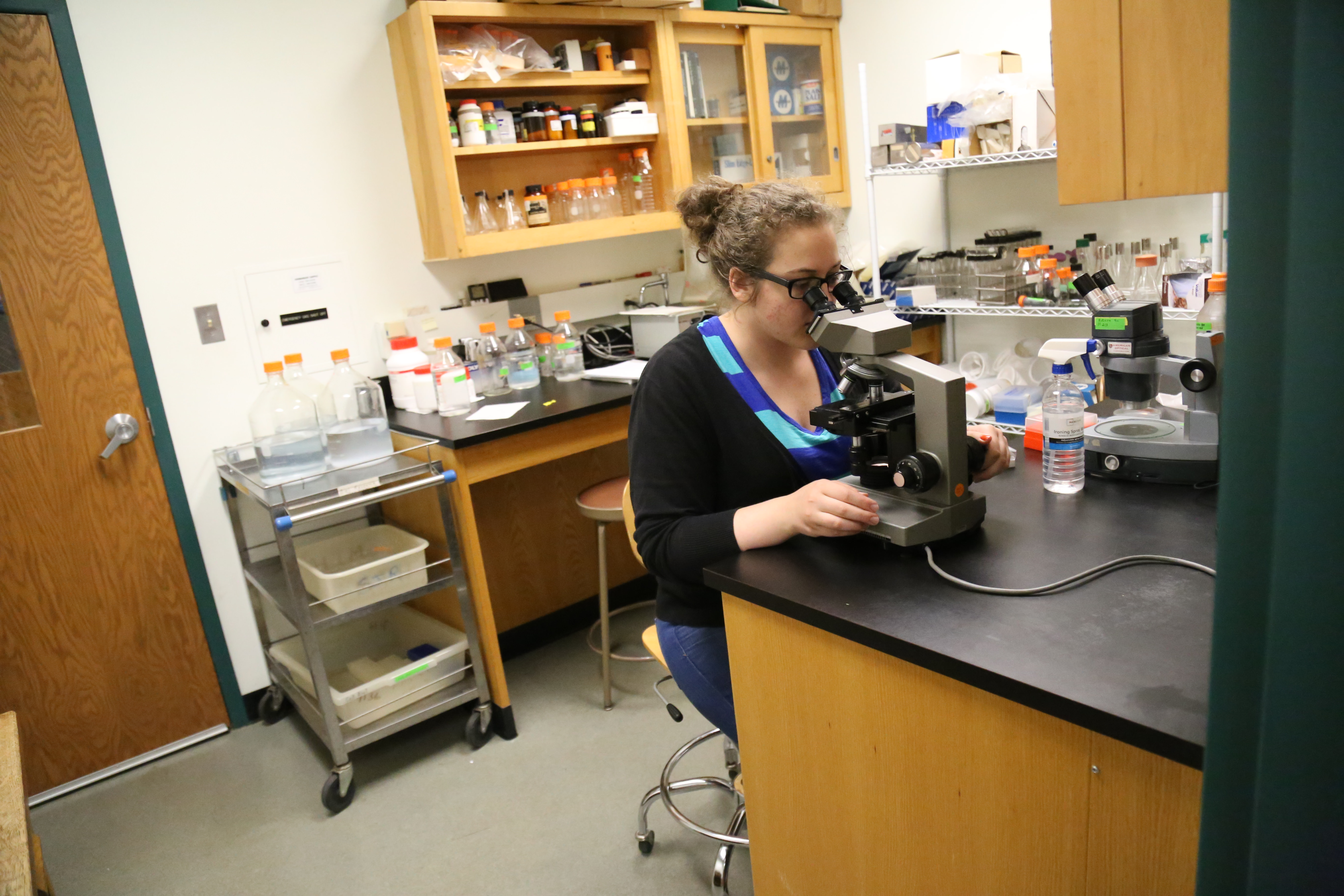
 Whether it’s exploring the relationship between math and music, testing the stress levels of drunk honeybees, or developing curriculum for a criminal justice course at the county jail, each year Goshen College students spend the summer doing intense study and research during the college’s eight-week Maple Scholars program.
Whether it’s exploring the relationship between math and music, testing the stress levels of drunk honeybees, or developing curriculum for a criminal justice course at the county jail, each year Goshen College students spend the summer doing intense study and research during the college’s eight-week Maple Scholars program.
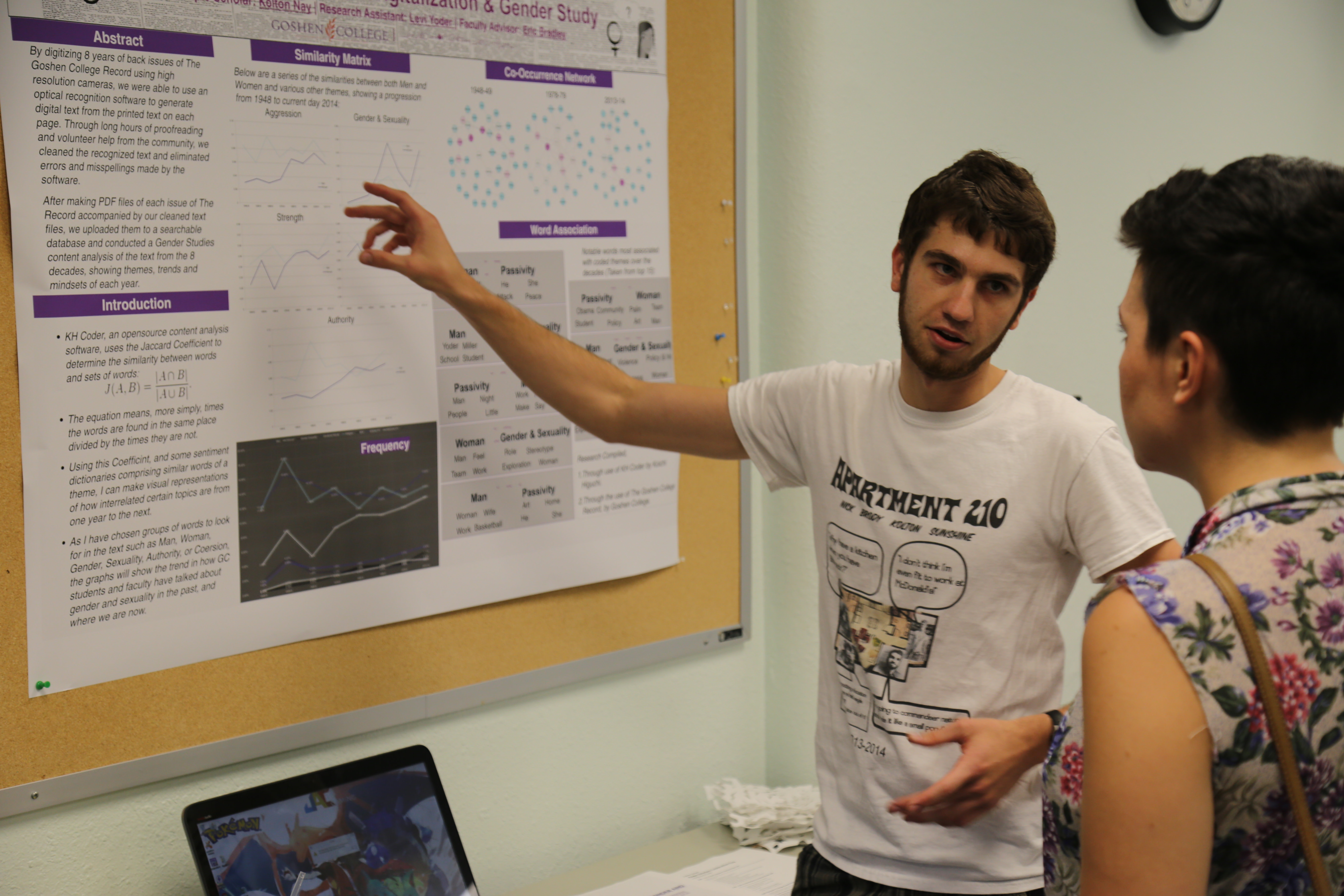
During the program, each scholar is paired with a faculty member who serves as both colleague and supervisor. Creating a community of scholars, the students all live together and take turns presenting their research and answering questions during Friday colloquiums. At the end is a celebration day when the results of each project are presented to the public.
» View past projects in the Maple Scholars archives
Student Applications
- Program overview
- Maple Scholars Projects 2024
- Student application (TBA)
- Questions about the program or how to apply? Contact the director.
Faculty Applications
Scholars in action